Hand Gesture Controlled Robot
The decision of making a gesture controlled the robot that will be operated by a hand gloved mounted with the transmission circuit assembly. The circuit assembly will consist of MPU-6050 Gyro Accelerometer sensor for direction control & Arduino board along with a nRF24L01 RF module to establish remote communication (data transfer) which together function as an input device to the bot.
My youtube video:


Aim:
i)Where human intervention is not possible or is not desirable(e.g. 2013 Savar building collapse), as in the case of spying(e.g. July 2016 Dhaka attack ), so at those places, we can use service bots and control the movement.
ii) 85% of people with disability are found in developing countries and about 10% of Bangladeshi population are affected, here service bots become handy.
iii)We can use it in Warfield for bomb detection, enemy search, etc.
Components:
For Receiver:
- Arduino Nano(x1)
- nRF24L01(x1)
- 10 μF capacitor(x1)
- L298N H-Bridge Motor Driver(x1)
- Robot car chassis(x1), DC motor and wheel(x2)
- Mini Breadboard(x1)
- Battery
- Glue gun or Both side tape
- Some jumper wires
For Transmitter:
- Arduino Nano(x1)
- nRF24L01(x1)
- 10 μF capacitor(x1)
- MPU6050 Gyro with Accelerometer(x1)
- Mini Breadboard(x1)
- Battery
- Hand Gloves
- Glue gun or Both side tape
- Some jumper wires
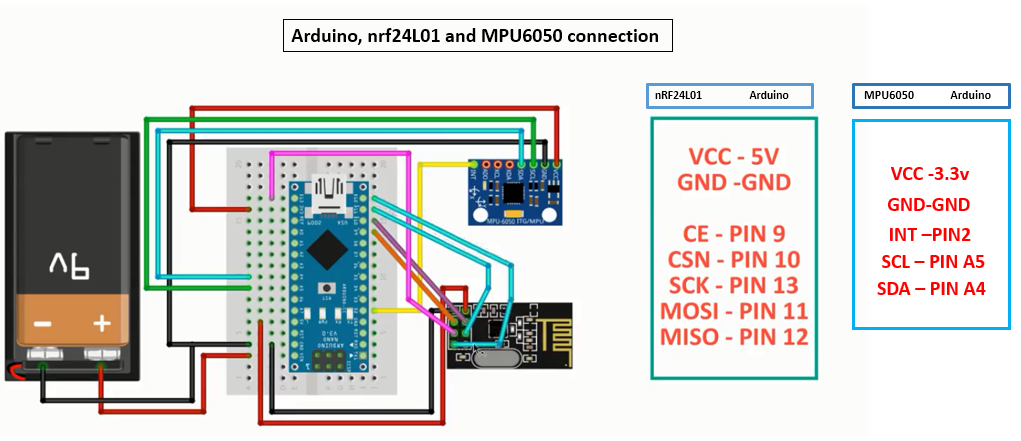
Circuit Diagram:
Receiver:
Receiver:

Transmitter:
 Arduino nano:
Arduino nano:- Microcontroller ATmega328
- Operating Voltage (logic level): 5 V
- Input Voltage (recommended): 7-12 V
- Input Voltage (limits): 6-20 V
- Digital I/O Pins : 14 (of which 6 provide PWM output)
- Analog Input Pins: 8
- DC Current per I/O Pin: 40 mA
- Flash Memory 32 KB (ATmega328) of which 2 KB used by bootloader
- SRAM: 2 KB (ATmega328)
- EEPROM: 1 KB (ATmega328)
- Clock Speed: 16 MHz
- Dimensions: 0.73" x 1.70"
Powering the Arduino Nano:
The Arduino Nano can be powered via the Mini-B USB connection, 6-20V unregulated external power supply (pin 30), or 5V regulated external power supply (pin 27).The power source is automatically selected to the highest voltage source.
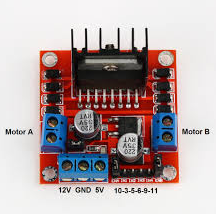
L298N H-Bridge Motor Driver:
- Driver: L298N
- Driver power supply: +5V~+46V
- Driver Io: 2A
- Logic power output Vss: +5~+7V (internal supply +5V)
- Logic current: 0~36mA
- Controlling level: Low -0.3V~1.5V, high: 2.3V~Vss
- Enable signal level: Low -0.3V~1.5V, high: 2.3V~Vss
- Max power: 25W (Temperature 75 Celsius)
- Working temperature: -25C~+130C
- Dimension: 60mm*54mm
- Driver weight: ~48g
- Other extensions: current probe, controlling direction indicator, pull-up resistor switch, logic part power supply.
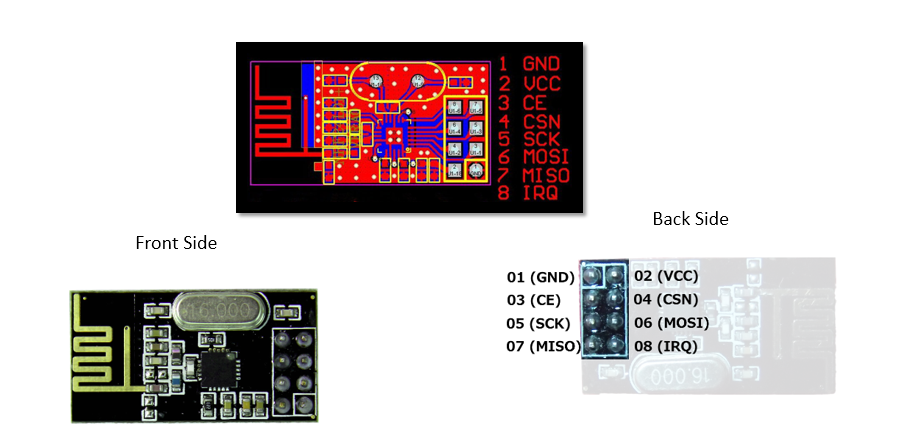
nRF24L01:
- Worldwide 2.4GHz ISM band operation
- Up to 2Mbps on-air data rate
- Ultra low power operation
- 11.3mA TX at 0dBm output power
- 12.3mA RX at 2Mbps air data rate
- 900nA in power down
- 22µA in standby-I
- On chip voltage regulator
- 1.9 to 3.6V supply range
- Enhanced ShockBurst™
- Automatic packet handling
- Auto packet transaction handling
MPU6050 (Gyro with Accelerometer)
- Chip: MPU-6050
- Power supply: 3~5V Onboard regulator
- Communication mode: standard IIC (pronounced I-two C) communication protocol
- Chip built-in 16bit AD converter, 16bit data output
- Gyroscopes range: +/- 250 500 1000 2000 degree/sec
- Acceleration range: +/- 2g, +/- 4g, +/- 8g, +/- 16g
- Pin pitch: 2.54mm
- Great for DIY projects

Application:
- Gestures can be used to control interactions for entertainment purposes such as gaming to make the game player's experience more interactive or immersive.
- Through the use of gesture recognition, remote control with the wave of a hand of various devices is possible.
- Industrial application for trolley control, lift control, etc.
- Military application to control robotics.
- Medical application for surgery purpose.
- Construction application.
See my youtube video:








Hi.i can't see any code, please give me code link.
ReplyDeletehi.I saw the same project on youtube on the channel mert arduino.but you have used an extra part in the reciever.could you say whats that ??
ReplyDelete